

Fidelity Maps for model Calibration and Validation
A fidelity map (FM) is defined as the region in the parameter space where the discrepancy between the model prediction and the experimental data is below a user-defined threshold. A fidelity map constructed in a (X,A) space based on two responses (Y1, Y2) is depicted below along with the corresponding admissible region in the response space. Note that the FM can be built based on variables to estimate (e.g., X: a Young's modulus) as well as aleatory variables (e.g., A: loads).
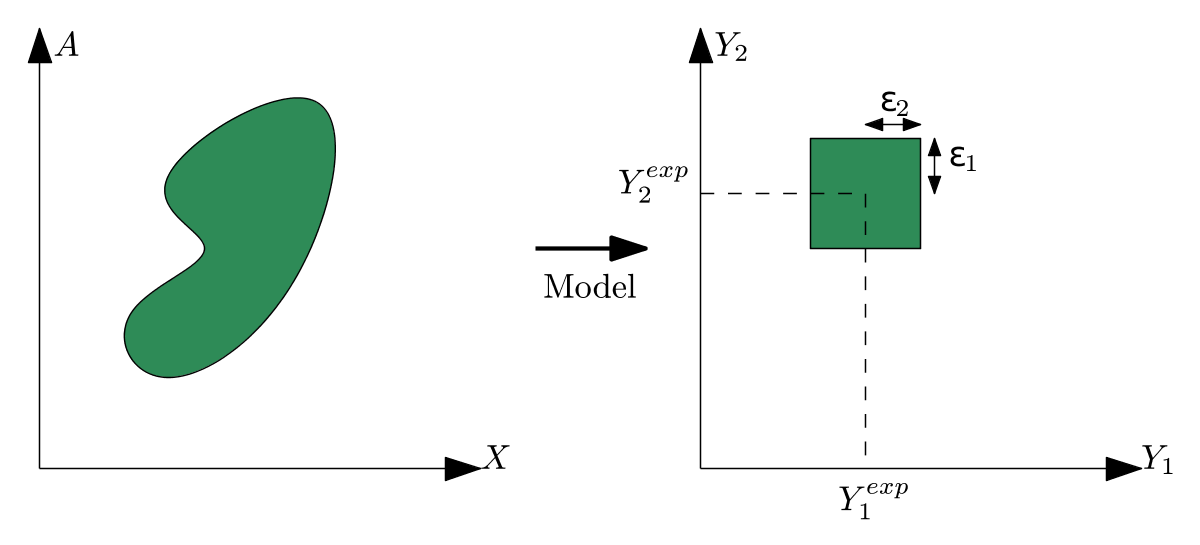
Figure 1: Basic representation of a fidelity map.
The maps are constructed using a Support Vector Machine with adaptive sampling. The FM approach has the following advantages:
- It implicitly accounts for the unknown correlation structure of the outputs
- Allows building efficiently an approximation of the likelihood function.
- The calibration can be either perfromed by maximum likelihood or Bayesian update.
- Can handle a large number of responses, potentially discontinuous.
- Only one SVM classifier is needed thus allowing a reduction in the number of function calls.
The fidelity maps are currently being extended as a validation tool.
En güncel ve yüksek deneme bonusu veren siteler 2023 listesi üzerinden deneme bonusunuzu alın. Bonus veren bahis siteleri için lapalmroyalbeachhotel.com adresimizi ziyaret edin.
References:
, “Bayesian Calibration Using Fidelity Maps”, Proceedings of the 11th International Conference on Structural Safety & Reliability, New York, NY: 2013.
, “A Bayesian Approach for Identification using Support Vector Machines”, Proceedings of the 2012 ASME Verification and Validation Symposium, 2012.
Theme by Danetsoft and Danang Probo Sayekti inspired by Maksimer